
動作原理
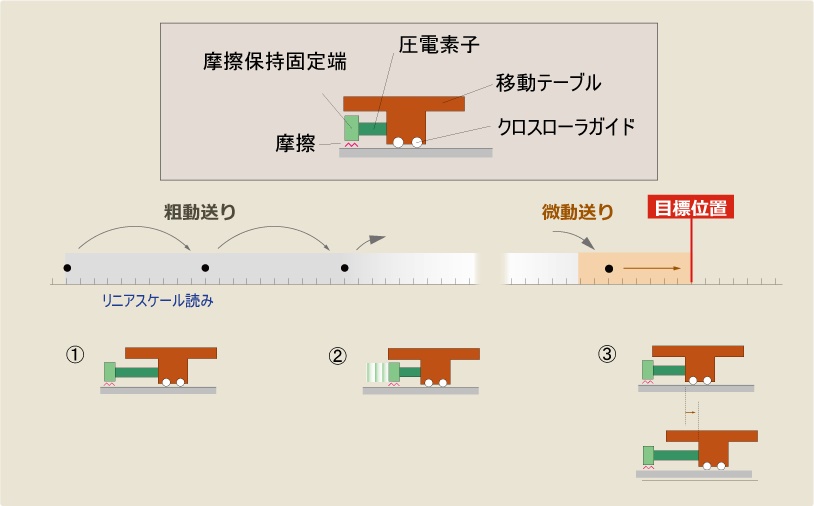
(1)圧電素子をゆっくり伸長させ移動テーブルが前進
(2)圧電素子を急峻に縮めることで摩擦部が滑り移動
→ (1)(2)を繰り返してミリメートルの粗動
(3) 圧電素子にDC的に電圧を印加して目標位置へ高精度に位置決め.
停止後もリニアスケールの信号をフィードバックし位置制御を維持
動作原理
(1)圧電素子をゆっくり伸長させ移動テーブルが前進
(2)圧電素子を急峻に縮めることで摩擦部が滑り移動
→ (1)(2)を繰り返してミリメートルの粗動
(3) 圧電素子にDC的に電圧を印加して目標位置へ高精度に位置決め.
停止後もリニアスケールの信号をフィードバックし位置制御を維持





